TG
Senior Member
I thought I'd share a project I've been working on.
My initial intention was to automate my 1970's BENMAR 16B Autopilot by substituting the signal from the Binnacle with a signal generated using data from my Furuno Navnet. My reasoning was two-fold, I could retain the old system as a backup and, integrating into the old system with this method seemed to be the least invasive should I abandon the project.
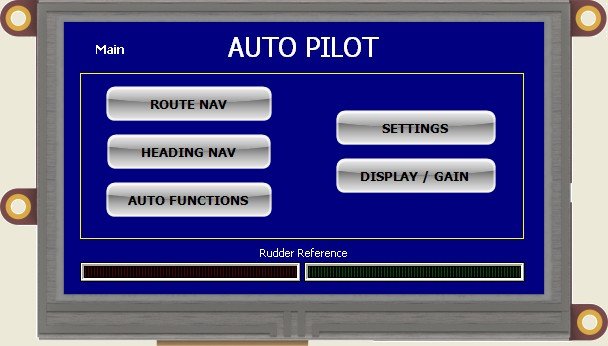
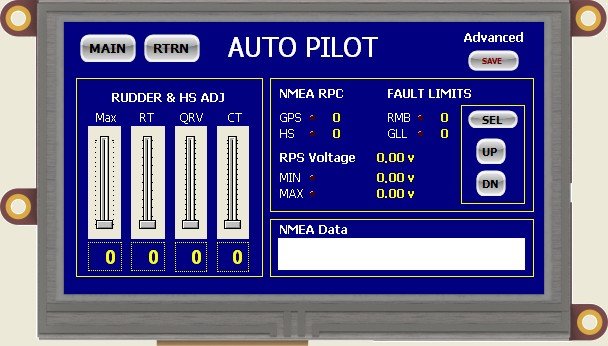
The ultimate goal was to be able to navigate a route or hold a heading. Secondly, the new device should be able to pick up the route automatically when set or cancelled on the chart plotter.
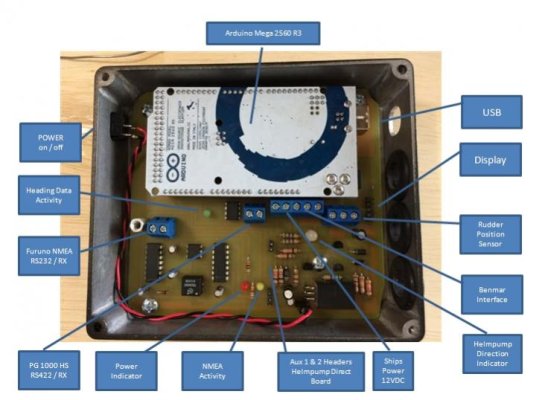
I chose the Arduino Mega platform for the usual reasons, it's inexpensive and there exists a huge knowledge base and developer network.
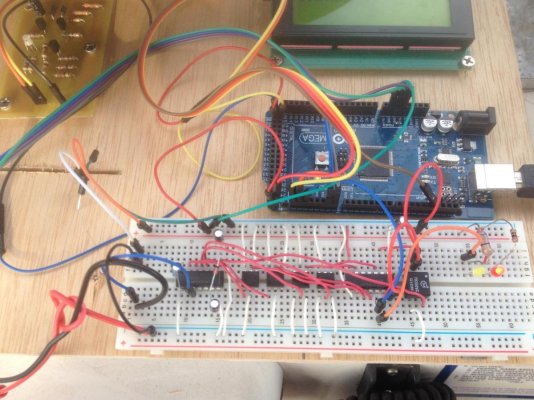
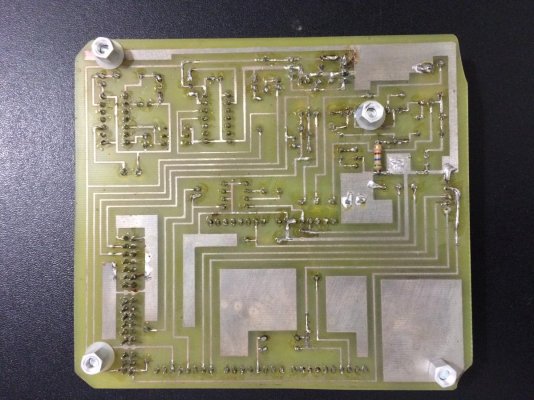
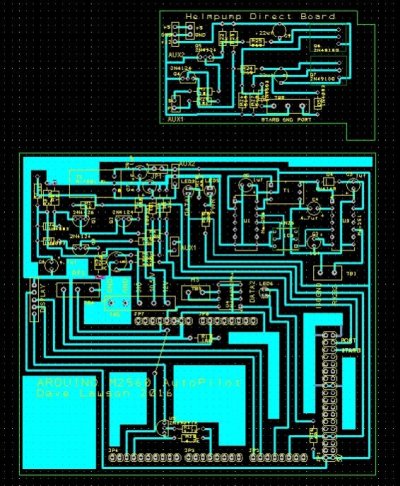
I did some initial circuit design to create the link from the arduino to the Benmar, basically converting the 5v logic signals to voltages the schmitt triggers on the benmar main board could use to operate the helm pump.
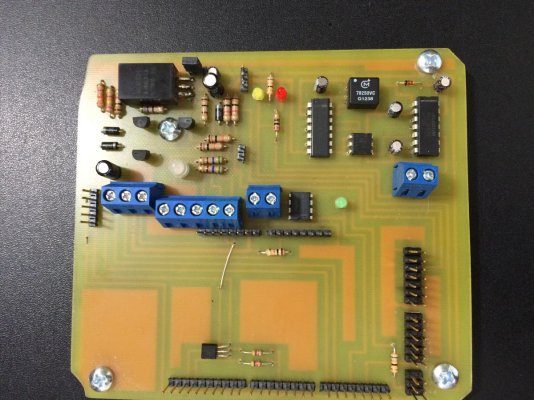
The small circuit board in the upper left of the photo below was my first attempt at interfacing with the Benmar. I connected it up and wrote a small program to send a signal to apply left rudder for 10ms then wait 10ms then right rudder 10ms and ran it in a continuous loop. I achieved success on the first attempt and boy was that exciting, I knew right then this was going to work.
The next step was to develop the data interfaces. RS232 for NMEA, RS422 for the heading sensor. All of this needed to be converted to 5v TTL levels in order to be compatible with the Arduino Serial ports. I spent a lot of time designing and bread-boarding circuits at this stage, but ultimately settled on a Maxim 250/251 isolated transceiver chipset for the RS232 and a Maxim 487 transceiver for the RS422. (To Be Continued)
My initial intention was to automate my 1970's BENMAR 16B Autopilot by substituting the signal from the Binnacle with a signal generated using data from my Furuno Navnet. My reasoning was two-fold, I could retain the old system as a backup and, integrating into the old system with this method seemed to be the least invasive should I abandon the project.
The ultimate goal was to be able to navigate a route or hold a heading. Secondly, the new device should be able to pick up the route automatically when set or cancelled on the chart plotter.
I chose the Arduino Mega platform for the usual reasons, it's inexpensive and there exists a huge knowledge base and developer network.
I did some initial circuit design to create the link from the arduino to the Benmar, basically converting the 5v logic signals to voltages the schmitt triggers on the benmar main board could use to operate the helm pump.
The small circuit board in the upper left of the photo below was my first attempt at interfacing with the Benmar. I connected it up and wrote a small program to send a signal to apply left rudder for 10ms then wait 10ms then right rudder 10ms and ran it in a continuous loop. I achieved success on the first attempt and boy was that exciting, I knew right then this was going to work.
The next step was to develop the data interfaces. RS232 for NMEA, RS422 for the heading sensor. All of this needed to be converted to 5v TTL levels in order to be compatible with the Arduino Serial ports. I spent a lot of time designing and bread-boarding circuits at this stage, but ultimately settled on a Maxim 250/251 isolated transceiver chipset for the RS232 and a Maxim 487 transceiver for the RS422. (To Be Continued)











 :lol:
:lol: