JDCAVE
Guru
- Joined
- Apr 3, 2011
- Messages
- 2,902
- Location
- Canada
- Vessel Name
- Phoenix Hunter
- Vessel Make
- Kadey Krogen 42 (1985)
The depth I'm failing in is <100', usually <50'...
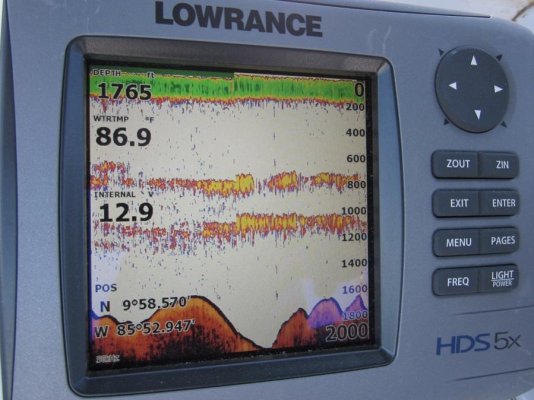
I have seen the depth reading briefly bounce to 10' while not moving in 25' of water (anchored and stern tied). It freaked me out so I walked the perimeter with a lead line to confirm 25'. While it bounced around, I could see the bottom plot in the sounder view of my MFD jump up and back down again. Playing around with gain and other settings had no effect to eliminate the bounce. I had a couple similar experiences while underway in 1,500' of water. The readings jumped up to 10' feet for many minutes before finding bottom or reading nothing (expected in the extreme depths at the time).
I suspect some sort of "mid water scattering layer" is responsible, either fish, or jellyfish. Zooplankton and sometimes intense layer of dead phytoplankton can also be responsible. Sorry, I should have thought about this earlier. Low powered units sometimes have trouble penetrating a dense layer and still seeing bottom. If the unit is on automatic, it is cycling between low frequency and high frequency. The unit detects a shallow layer and switches to the 200 KHz range and sets the range scale on the display to a shallower setting.
We have encountered jellyfish aggregations in Desolation Sound that are so dense that you worry about them clogging raw water intakes. A dense school of juvenile herring may also be encountered in anchorages.
Jim